

ভূমিকা
ইদানীং #লাইন #ফলোয়ার রোবট (LFR – Line Follower Robot) নিয়ে প্রচুর মাতামাতি চলছে। স্কুল, কলেজ ভার্সিটি কিংবা বিজ্ঞান মেলার প্রজেক্ট হিসেবেও এর বিশেষ কদর নবীনদের কাছে অনেক। আজ আমরা এমনি একটি লাইন ফলোয়ার রোবট তৈরি করবার কৌশল এবং এর সার্কিট ও বেসিক ব্যাপার গুলো জানবো। সেই সাথে বাংলাদেশে রোবটিক্স চর্চা ও এর অগ্রগতি সম্পর্কেও টুকটাক তথ্য তুলে ধরবো। তাহলে চলুন আর দেরি না করে জেনে নেই #রোবট এর অদ্যপান্ত।
পরিচ্ছেদসমূহ
- 1 ভূমিকা
- 2 রোবট কি বা রোবট কাকে বলে?
- 3 রোবট শব্দটির উৎপত্তি কিভাবে হলো?
- 4 বাংলাদেশে রোবটের সূচনা ও অগ্রগতিঃ
- 5 লাইন ফলোয়ার রোবট কি?
- 6 মাইক্রোকন্ট্রোলার ছাড়া লাইন ফলোয়ার রোবট
- 7 রোবট তৈরির আগে কিছু পরামর্শঃ
- 8 লাইন ফলোয়ার রোবটের মূলনীতিঃ
- 9 লাইন ফলোয়ার রোবট সার্কিট ডায়াগ্রামঃ
- 10 অবশ্যই পালনীয় কিছু কর্তব্যঃ
- 11 কোন মেথডে LFR রোবট কাজ করে?
- 12 LFR সার্কিট এর কার্যপ্রণালীঃ
- 13 রোবট সামনে চলবে যেভাবেঃ
- 14 রোবট বামে চলবে যেভাবেঃ
- 15 মোটর নির্বাচনঃ
- 16 মোটর পাওয়ার রেটিংঃ
- 17 মোটর RPM:
- 18 গিয়ার মোটরঃ
- 19 লাইন ফলোয়ার রোবট (LFR) এর কম্পোনেন্ট লিস্টঃ
- 20 এই লাইন ফলোয়ারের ভিডিও লিংকঃ
- 21 লাইন ফলোয়ার রোবট (LFR) নিয়ে যত প্রশ্ন ও উত্তর
- 22 উপসংহার
রোবট কি বা রোবট কাকে বলে?
একটি গুরুত্বপূর্ণ প্রশ্ন হচ্ছে রোবট কাকে বলে বা রোবট জিনিসটা আসলে কি? সহজ ভাবে বললে রোবট (Robot) হচ্ছে যান্ত্রিক ও কৃত্রিম বুদ্ধিমত্তা (Artificial Intelligence – AI) সম্পন্ন বিশেষ যন্ত্র। যা কিনা প্রোগ্রামিং ও ইলেকট্রনিক সার্কিটের মাধ্যমে নিয়ন্ত্রিত হয়।
রোবট শব্দটির উৎপত্তি কিভাবে হলো?
রোবট শব্দটি চেক লেখক কার্ল কাপেক (Karel Čapek) ১৯২০ সালে লিখিত নাটকে প্রথম ব্যবহার করেন। নাটকটির নাম ছিল রসাম ইউনিভার্সাল রোবট (R.U.R. – Rossum Universal Robot)
বাংলাদেশে রোবটের সূচনা ও অগ্রগতিঃ
আমাদের বাংলাদেশ ও কিন্তু রোবটের দিক থেকে পিছিয়ে নেই। এখন জানবো তারই কিছু কথা।
উল্লেখ্য যে, লেখার তথ্যগুলো পুরানো। যারা জানেন না তাদের আশাকরি উপকার হবে তবে নতুন কোন তথ্য আপনার/আপনাদের কাছে থাকলে আমাদের সবার প্রিয় সৈয়দ রাইয়ান ভাইয়ের কাছে মেইল কিংবা ফেসবুকে মেসেজের মাধ্যমে জানাতে অনুরোধ রাখছি। উনি প্রয়োজনীয় সম্পাদনা করে লেখা আপডেট করে দিবেন।
হ্যাক – খুলনা প্রকৌশল ও প্রযুক্তি বিশ্ববিদ্যালয়, ২০০৫
প্রফেসর ড এম এম এ হাসেম ‘খুলনা প্রকৌশল ও প্রযুক্তি বিশ্ববিদ্যালয়’ এ ২০০৫ সালে ‘হার্ডওয়্যার এক্সেলেরশন ক্লাব অফ কুয়েট – হ্যাক’ নামে একটি ক্লাব প্রতিষ্ঠা করেন। সেই ক্লাবের সূত্র ধরে মাইক্রোকন্ট্রোলারের প্রাথমিক শিক্ষা দেন শিক্ষার্থীদের। ধীরে ধীরে শুরু হয় রোবোটিক্স নিয়ে বিভিন্ন প্রকল্পের কাজ।
রুয়েট রোবোটিক্স সোসাইটি – রুয়েট, রাজশাহী
রাজশাহী প্রকৌশল ও প্রযুক্তি বিশ্ববিদ্যালয় এর যন্ত্রকৌশল বিভাগের বর্তমান এসোসিয়েট প্রফেসর ড. মোঃ রোকনুজ্জামান এর উদ্যোগে প্রতিষ্ঠিত হয় “রুয়েট রোবোটিক্স সোসাইটি”। উন্নত বিশ্বের রোবোটিক্স চর্চার ব্যপ্তি দেখে উনিও অনুপ্রানিত হয়ে নিজ বিশ্ববিদ্যালয়ের শিক্ষার্থীদের রোবোটিক্স নিয়ে আগ্রহী করে তোলার লক্ষ্যে কাজ করে যাচ্ছেন। রুয়েট রোবোটিক্স সোসাইটি এর উদ্যোগে এখন শব্দানুভূতিসম্পন্ন রোবট তৈরির কাজ চলছে, অন্যান্য রোবোটগুলোর মধ্যে স্পাই অফ রুয়েট, কাঁকড়া-২ উল্লেখযোগ্য।
রোবো-মেকাট্রনিক্স এসোসিয়েশন – চুয়েট, চট্টগ্রাম
চট্টগ্রাম প্রকৌশল ও প্রযুক্তি বিশ্ববিদ্যালয় এ রয়েছে রোবো-মেকাট্রনিক্স এসোসিয়েশন। মূলত চুয়েটের শিক্ষার্থীদের মাঝে রোবোটিক্স চর্চাকে জনপ্রিয় করার লক্ষ্যে এ ক্লাবটি কাজ করে যাচ্ছে এবং বেশ কয়েকটি সফল রোবট ইতিমধ্যে বিভিন্ন প্রতিযোগিতায় ও প্রদর্শনীতে অংশ নিচ্ছে।
ব্র্যাক ইউনিভার্সিটি রোবোটিক্স ক্লাব – ঢাকা
ব্র্যাক ইউনিভার্সিটি রোবোটিক্স ক্লাব প্রতিষ্ঠিত হয় মূলত চন্দ্রবোট এর সাফল্যের ধারাবাহিক প্রচেস্টার অংশ হিসেবে। চন্দ্রবোটের সাফল্যে এবং রোবোটিক্স চর্চায় শিক্ষার্থীদের আগ্রহ দেখে এই ক্লাবটি প্রতিষ্ঠা করেন ড. মোঃ খলিলুর রহমান। চন্দ্রবোট ছাড়াও ইতিমধ্যে বেশ কয়েকটি দুর্দান্ত রোবট তৈরি করেছে এ ক্লাবের সদস্যরা।
এছাড়াও বিভিন্ন বিশ্ববিদ্যালয়ে ও প্রতিষ্ঠানে শিক্ষার্থীদের উদ্যোগে গড়ে উঠছে আরো অনেক রোবোটিক্স ক্লাব।
এখন আমাদের মূল প্রসঙ্গ লাইন ফলোয়ার রোবট বা এলএফআর (LFR) নিয়ে আলোচনা শুরু করছি।
লাইন ফলোয়ার রোবট কি?
- সাদা মেঝের উপর কালো টেপ বা,
- কালো মেঝের উপর সাদা টেপ দিয়ে করা যেতে পারে।
মাইক্রোকন্ট্রোলার ছাড়া লাইন ফলোয়ার রোবট
রোবট তৈরির আগে কিছু পরামর্শঃ
- প্রথমে ইলেকট্রনিক্স ভিত্তিক কিছু রোবট তৈরি করুন। যেমনঃ লাইন ফলোইং রোবট, লাইট ফলোইং রোবট ইত্যাদি
- সার্কিট সম্পর্কে সুস্পষ্ট ধারণা অর্জন করা।
- ডেভেলপড এবং এডভান্স রোবট তৈরির জন্য অবশ্যই ইলেকট্রনিক্সের মৌলিক বিষয়গুলো ভালোভাবে আয়ত্ত্বে আনতে হবে।
লাইন ফলোয়ার রোবটের মূলনীতিঃ
লাইন ফলোয়ার রোবট এর মূলনীতি খুবই সাধারন। এটি একটি লাইন বা ট্র্যাক অনুসরণ করে চলবে। আর এই লাইন এবং এর আশেপাশের রঙ (সাদার উপর কালো অথবা কালর উপর সাদা) -এর পার্থক্য নির্ণয়ের জন্য যেকোন লাইট সেনসিটিভ সেন্সর (ডার্ক সেন্সর বা লাইট সেন্সর) ব্যবহার করা যেতে পারে।
এখানে রোবট কিভাবে লাইন ট্র্যাক করবে এবং রোবট কখন কোন দিকে চলবে তার একটি ডায়াগ্রাম দেয়া হল।

তাহলে এখন এই ডায়াগ্রাম দেখে রোবটের মূলনীতিটা আগে বুঝে নেয়া যাক-
এই রোবটে দুটি লাইট সেনসিটিভ সেন্সর ব্যবহার করা হয়েছে। সেন্সর হিসেবে এখনে এলডিআর (LDR) ব্যবহার করা হয়েছে। ডায়াগ্রাম-১ এ সেন্সর দুটিকে নির্দেশ করা হয়েছে S1 এবং S2 দ্বারা। যদি আমাদের লাইন কালো হয় তাহলে,
- রোবটের S1 সেন্সর যখন কালো লাইন সেন্স করবে তখন রোবট বামে চলবে। অনুরূপভাবে,
- যখন রোবটের S2 সেন্সর যখন কালো লাইন সেন্স করবে তখন ডানে চলবে।
এইভাবেই রোবটটি লাইন অনুসরণ করবে এবং ডান-বাম করে লাইনে বজায় থাকবে। কিভাবে রোবটটি এই কাজ সম্পন্ন করবে আর এর সার্কিট কিভাবে কাজ করবে তার প্রতিটি ধাপ নিচে বর্ণনা করছি।
লাইট সেনসিটিভ সেন্সর সম্পর্কে জানতে আমাদের ইলেকট্রনিক্সে প্রকাশিত এই লেখাটি পড়তে পারেন।
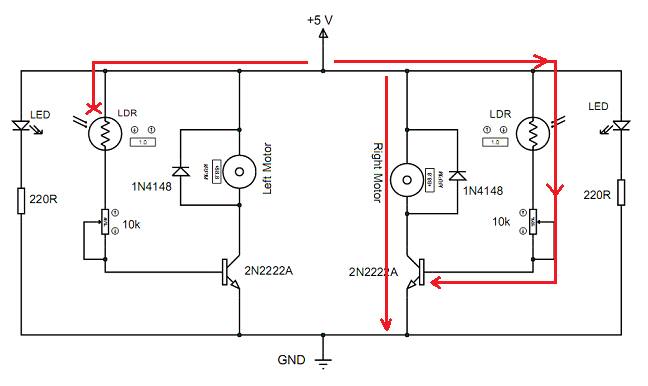
লাইন ফলোয়ার রোবট সার্কিট ডায়াগ্রামঃ
রোবটের উপরিউক্ত নেভিগেশন প্রিন্সিপালের উপর ভিত্তি করে কালো লাইন কে ট্র্যাকিং করে ফলো করার জন্য যতদূর সম্ভব সহজ একটি সার্কিট তৈরি করা হয়েছে । আরো বিভিন্ন রকম সার্কিট ব্যবহার করা সম্ভব (Op-Amp, Mosfet, Jfet) তবে বুঝবার সুবিধের জন্য এই বেসিক সার্কিটই বেশী কার্যকরী বলে এটিই দিলাম। এখানে উল্লেখ্য যে, সার্কিট টি আমি নিজে সফল ভাবে পরীক্ষা করেছি যার ভিডিও এই লেখার শেষ অংশে পাবেন।
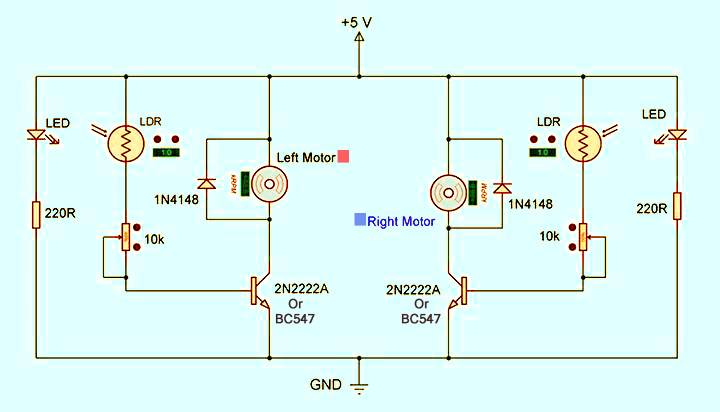
LDR এবং ট্রানজিস্টরের এই সাধারন নীতি ব্যবহার করে আমারা উক্ত সার্কিটের সাহায্যে কালো লাইন ট্র্যাক করে লাইন ফলোইয়ার রোবট তৈরি করতে পারি। সেক্ষেত্রে LDR এবং সাদা LED এমনভাবে বসাতে হবে যাতে করে যখন LDR ঠিক কালো লাইনের উপর থাকবে তখন LED থেকে নির্গত আলো এর উপর খুব সামান্য পরিমাণে প্রতিফলিত হয়। এতে করে মোটরটি আগের চেয়ে খুব ধীর গতিতে চলবে। কারন ট্রানজিস্টরের বায়াসিং এর কারনে কালেক্টর কারেন্ট কম থাকবে। আবার যখন কালো লাইনের বাইরের দিকে থাকবে তখন থেকে এর উপর বেশি আলো প্রতিফলিত হবে এবং মোটর দ্রুত চলবে (বায়াসিং এর কারনে কালেক্টর কারেন্ট বেশি থাকবার কারনে)।
এখানে একটি গুরুত্বপূর্ণ ব্যাপার হচ্ছেঃ LED থেকে LDR এর উপরে সরাসরি আলো পড়লে কাজ হবে না, লাইনে প্রতিফলিত হয়ে LDR এ পড়তে হবে।

সার্কিটে ট্রিমার পটেনশিওমিটার ব্যবহার করা হয়েছে ডি.সি মোটরের স্পীড কে নিয়ন্ত্রণ করার জন্য। ডি.সি মোটরের সাথে প্যারালালে ডায়োড ব্যবহারের কারন হচ্ছে- যখন ট্রানজিস্টর অফ থাকবে তখন ডি.সি মোটরের ইন্ডাক্টর দ্বারা সৃষ্ট EMF (electromotive force) থেকে ট্রানজিস্টরকে রক্ষা করা।
অবশ্যই পালনীয় কিছু কর্তব্যঃ
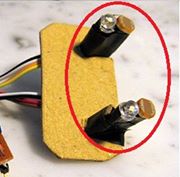
- উপরোক্ত ডায়াগ্রামে রোবট টির সেন্সর গুলোকে কিভাবে স্থাপন করতে হবে তার ডায়াগ্রাম দেখানো হয়েছে। LDR এবং LED গুলোকে বোর্ডে এমনভাবে বসাতে যাতে করে থেকে নিঃসৃত আলো ফ্লোরে/লাইনে প্রতিফলিত হয়ে এর উপর পড়ে।
- সেজন্য LDR এবং LED-এর মধ্যবর্তী দূরত্ব যেন কম হয় (৮ মিলিমিটার হলে ভালো) ।
- অবশ্যই খেয়াল রাখতে হবে LED থেকে নিঃসৃত আলো যেন সরাসরি LDR-এর উপর না পড়ে।
- সরাসরি আলোর আপতন থেকে বাঁচাতে LDR-কে আলদাভাবে টেপ দিয়ে প্যাচিয়ে দিলে ভালো হয়। ফলে LED থেকে নিঃসৃত আলো সরাসরি LDR-এর উপর পড়বে না। নিচের ছবি দেখলে বুঝা যাবে আশাকরি।
কোন মেথডে LFR রোবট কাজ করে?
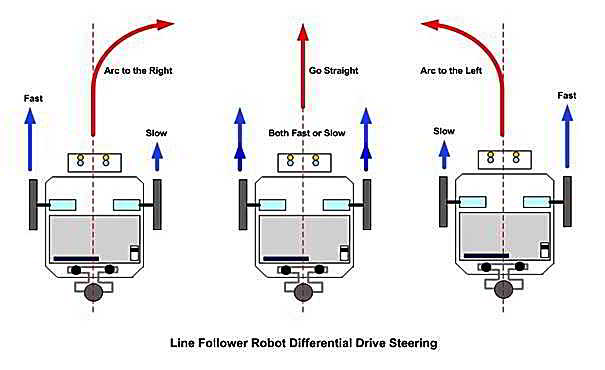
এই লাইন ফলোয়ার রোবট কে কন্ট্রোলের জন্য যে মেথড ব্যবহার করা হয়েছে তাকে বলা হয় ‘Differential Drive’ স্টিয়ারিং মেথড। এ পদ্ধতিতে-
- ২ টি আলদা মোটর রোবটের চেসিসের বাম এবং ডান পাশে ফিক্সড করে লাগিয়ে দেয়া হয়। আর,
- মোটরের রোটেশনাল স্পীড কন্ট্রোল করে রোবটের মুভমেন্ট কন্ট্রোল করা হয়।
যার মানে হচ্ছে-
- রোবটকে বামে ঘুরাতে চাইলেঃ বাম পাশের মোটরের স্পীড ডান পাশের মোটরের স্পীডের তুলনায় কমিয়ে দিয়ে রোবটকে বামে turn করানো হয়।
- রোবটকে ডানে ঘুরাতে চাইলেঃ রোবটকে ডানে turn করানোর জন্য ডান পাশের মোটরের স্পীড বাম পাশের মোটরের স্পীডের তুলনায় কমিয়ে দেয়া হয়।
- রোবটকে সামনে চালাতে চাইলেঃ যখন দুটি মোটরের স্পীড সমান থাকে তাহলে রোবট সামনে যায়।
নিচের চিত্র দেখে ব্যাপারটা পরিষ্কার হবে আশা করি ।
LFR সার্কিট এর কার্যপ্রণালীঃ
এই রোবটের সেন্সর হিসেবে ব্যবহার করা হয়েছে LDR (Light dependent resistor). প্রথমে LDR-এর বেসিক ব্যাপারটা বলে জেনে নেয়া ভালো। LDR হচ্ছে একটি বিশেষ ধরনের রেজিস্টর যার রেজিস্ট্যান্স আলোর তীব্রতার উপর নির্ভরশীল। অর্থাৎ, LDR-এর উপর আলো পড়লে এর রেজিস্ট্যান্স কমতে থাকে। আলোর তীব্রতা যত বেশি হবে LDR-এর রেজিস্ট্যান্স ততো কম হবে। আর সম্পূর্ণ অন্ধকারে LDR-এর রেজিস্ট্যান্স সব চাইতে বেশি থাকে (100%)। মানে, LDR-এর রেজিস্ট্যান্স হার আলোর তীব্রতার ব্যাস্তানুপাতিক।
এখানে উল্লেখ্য যে বাজারে বর্তমানে কিছু LDR পাওয়া যাচ্ছে যার রেজিস্ট্যান্স আলোর তীব্রতার সাথে সাথে বৃদ্ধিপায়। সেক্ষেত্রে উক্ত সার্কিটে প্রয়োজনীয় পরিবর্তন করতে হবে।
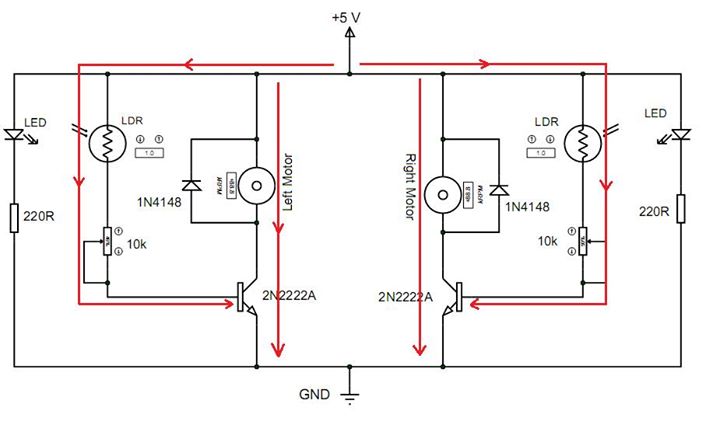
রোবট সামনে চলবে যেভাবেঃ
এখন ধরা যাক, সার্কিটটি তৈরির পর কালো লাইন এর উপর ছেড়ে দেয়া হয়েছে। পাওয়ার সুইচ অন করে দেয়ার সাথে সাথে রোবটটি চলতে শুরু করল। ধরি, কালো লাইন ট্র্যাকটি সেন্সরের S1 ও S2 এর মাঝামাঝি আছে ফলে এটি কালো লাইন কে সেন্স করছে না। তাই এটি সোজা চলবে।
কারন এসময় দুটি মোটরের স্পীড সমান। উল্লেখ্য, রোবটে পাওয়ার দেয়া শুরু থেকে LED অন থাকবে এবং সাদা মেঝেতে প্রতিফলিত হয়ে LDR-এর উপর পড়বে (কারন, সেন্সর দুটির একটিও এখন পর্যন্ত কালো লাইনের উপর আসে নি)। যার ফলে LDR-এর রেজিস্ট্যান্স কম থাকবে এবং কারেন্ট ফ্লো হয়ে ট্রানজিস্টরের বেইজে যাবে। যার কারনে ট্রানজিস্টরের কালেক্টর থেকে ইমিটারে কারেন্ট পাস করবে এবং কালেক্টরের সাথে মোটর সিরিজে সংযুক্ত থাকায় মোটরের মধ্য দিয়েও সেই পরিমাণ কারেন্ট ফ্লো হবে।
যদি সেন্সর দুটি সাদা মেঝের (ideal white floor) উপর থাকে তাহলে দুটি LDR-এর রেজিস্ট্যান্স সমান কম থাকবে এবং ট্রানজিস্টরের বেইজেও তদানুজায়ি কারেন্ট ফ্লো হবে। ফলে মোটর দুটি সমান স্পীডে ঘুরবে। এভাবে সার্কিটটি রোবটের সোজা চলতে সাহায্য করবে।
এখানে উল্লেখ্য যে- অবশ্যই কালেক্টর থেকে ইমিটারে কারেন্ট পাস করার মত যথেষ্ট কারেন্ট ট্রানজিস্টরের বেইজে দিতে হবে। যাতে সুইচিং হতে পারে। এজন্য সেন্সর দুটি যখন সাদা ফ্লোরের উপর থাকবে তখন যেন মোটর মোটামুটি একটি স্পীডে ঘোরে সেজন্য পটেনশিওমিটার ঘুরিয়ে অ্যাডজাস্ট করে নিতে হবে। কারন, পটেনশিওমিটারের রেজিস্ট্যান্স যদি বেশি থাকে তাহলে আলো প্রতিফলিত হয়ে LDR এর রেজিস্ট্যান্স কমে গেলেও পটেনশিওমিটারের রেজিস্ট্যান্স বেশি থাকার কারনে ট্রানজিস্টরের বেইজে যথেষ্ট পরিমাণ কারেন্ট যেতে পারবে না। ফলে মোটরেও ঘুরবে না।
রোবট বামে চলবে যেভাবেঃ
এখন মনে করি, চলতে চলতে বাম পাশের মোটরের সাথে যুক্ত সেন্সরটি (S1) কালো লাইনের উপর গেল অপরদিকে S2 সাদা ফ্লোরের উপরেই আছে। তখন, LED থেকে নিঃসৃত আলো প্রথমে কালো ট্র্যাকের উপর পড়বে, কিন্তু প্রতিফলিত হবে খুব কম পরিমাণে। কারন কালো জায়গায় আলোর প্রতিফলন খুব কম হয় (শোষিত হয় )।
আলো কম প্রতিফলিত হবার কারনে LDR-এর উপরও আলোর তীব্রতা কমে যাবে, ফলে এর রেজিস্ট্যান্স বেড়ে যাবে; এতে করে LDR ও পটেনশিওমিটার হয়ে ট্রানজিস্টরের বেইজে পর্যাপ্ত পরিমাণ কারেন্ট ফ্লো বাধাপ্রাপ্ত হবে। যার কারনে কালেক্টর থেকে ইমিটারে কারেন্ট পাস হবে না (খুব অল্প পরিমাণে হতে পারে; সেটা LDR-এর রেজিস্ট্যান্সের উপর নির্ভরশীল ) এবং সেন্সরের সাথে সংশ্লিষ্ট মোটর (left motor) বন্ধ হয়ে যাবে বা স্পীড কমে যাবে।
কিন্তু ডান পাশের সেন্সর ( S2 ) যেহেতু সাদা ফ্লোরের উপর আছে, সেহেতু S2 ‘LDR’ এর উপর আলোর তীব্রতা বেশি থাকবে এবং ডান পাশের LDR-এর সাথে সংশ্লিষ্ট মোটর ঘুরতে থাকবে। কারন, এক্ষেত্রে ডান পাশের ট্রানজিস্টরটি অন আছে। ফলে রোবটটি অটোমেটিক বামে ঘুরে যাবে। এভাবে সার্কিটটি রোবটের বামে টার্ন করা নিয়ন্ত্রন করবে।
উল্লেক্ষ্য, এক্ষেত্রে বাম পাশের মোটর অল্প পরিমাণে ঘুরতে পারে, কারন আগেই বলেছিলাম মোটরের মধ্য দিয়ে প্রবাহিত কারেন্টের পরিমাণ ট্রানজিস্টরের কালেক্টর কারেন্টের সমান আর এই কালেক্টর কারেন্টের পরিমাণ নির্ভর করে ট্রানজিস্টরের বেইজ কারেন্টের উপর। বেইজ কারেন্ট যদি সামান্য বেশি হয় (সুইচ করার জন্য যথেষ্ট) তাহলে মোটর এবং কালেক্টরের মধ্য দিয়েও সেই অনুযায়ী সামান্য পরিমান কারেন্ট প্রবাহিত হবে
বামে টার্ন করার লজিকের মতই রোবটের ডানে টার্ন করার লজিক একই। এক্ষেত্রে যখন S2 সেন্সর কালো লাইনের উপর আসবে তখন এর রেজিস্ট্যান্স বেড়ে যাবে এবং এর সংশ্লিষ্ট মোটর (Right motor) অফ হয়ে যাবে বা স্পীড কমে যাবে (LDR এর রেজিস্ট্যান্সের উপর নির্ভরশীল); এবং S1 সেন্সরের সাথে সংশ্লিষ্ট মোটরের (Left motor) স্পীড বেশি থাকায় রোবটটি ডানে টার্ন করবে ।
এই রোবটটি সফলভাবে তৈরির মূল চাবিকাঠি মোটর নির্বাচনের উপর ব্যাপকভাবে নির্ভরশীল।
মোটর নির্বাচনঃ
এই প্রোজেক্টের জন্য মোটর নির্বাচনে যেসব দিকে লক্ষ্য রাখতে হবে তা হচ্ছে –
মোটর পাওয়ার রেটিংঃ
৫ ভোল্ট বা ৬ ভোল্ট ডি.সি গিয়ার মোটর সিলেক্ট করা সবচাইতে ভালো, এবং যার কারেন্ট রেটিং কম। অর্থাৎ, যা লো পাওয়ার কনজিউম করে।
মোটর RPM:
কম RPM (Rotation per minute)-এর মোটর ব্যবহারের চেষ্টা করা উচিত। কারন, এখানে ব্যবহৃত সেন্সর ‘LDR’ অন্যান্য লাইট সেন্সেটিভ কম্পোনেন্ট/ সেন্সরগুলো থেকে স্লো রেসপন্সের (রেসপন্স করতে দেরী লাগে) তাই বেশি RPM-এর মোটর ব্যবহার করলে রোবট কালো লাইন ট্র্যাক করার জন্য যথেষ্ট সময় পাবে না। তাই লো RPM-এর মোটর ব্যবহার করা ভালো যাতে করে রোবটটি ঠিক মত ব্ল্যাক লাইন ট্র্যাক অনুসরণ করতে পারে।
গিয়ার মোটরঃ
এই প্রোজেক্টের ক্ষেত্রে ডি.সি গিয়ার মোটর সিলেক্ট করা বেস্ট। কারন গিয়ার মোটরের কিছু উপকারিতা আছে। যেমন এটি পাওয়ার সাপ্লাই অফ করে দেওয়ার সাথে সাথে বন্ধ হয়ে যায়, সাধারন ডি.সি মোটরের মত ধীরে ধীরে বন্ধ হয় না । গিয়ার সিস্টেমের কারনে এই জাতীয় মোটর খুব দ্রুত রোটেশনাল স্পীড চেঞ্জ করতে পারে। এই জাতীয় characteristic-এর কারনে এই প্রোজেক্টের ক্ষেত্রে গিয়ার মোটর সিলেক্ট করা সবচাইতে ভালো ।
সর্বোপরি, ভালো মানের একটি লাইন ফলোয়ার রোবট তৈরি করতে ৫ বা ৬ ভোল্টের, কম কারেন্ট রেটিং এবং কম RPM-এর গিয়ার মোটর ব্যবহার করা উচিত।

লাইন ফলোয়ার রোবট (LFR) এর কম্পোনেন্ট লিস্টঃ
- ৫ বা ৬ ভোল্টের ডিসি গিয়ার মোটর – ২ টি
- LDR – ২ টি
- Potentiometer 10K -২ টি
- Transistor (2N2222A/BC547 ) – ২ টি
- ডায়োড (1N4148) – ২ টি
- Resistor 220 ohm – ২ টি
- Battery (9v) (5v আউটপুট পেতে ‘LM7805’ regulator IC ব্যবহার করা যেতে পারে)
এই লাইন ফলোয়ারের ভিডিও লিংকঃ
আমার তৈরি লাইন ফলোয়ারের ভিডিও লিংক
http://youtu.be/LZ5DX3kX1kg
লাইন ফলোয়ার রোবট (LFR) নিয়ে যত প্রশ্ন ও উত্তর
লাইন ফলোয়ার কি মাইক্রোকন্ট্রোলার ছাড়া তৈরি করা সম্ভব?
অবশ্যই সম্ভব। জটিল লজিক না থাকলে যে কোনো সার্কিট মাইক্রোকন্ট্রোলার ছাড়াই বানানো সম্ভব। আর লাইন ফলোয়ারের লজিক অত্যন্ত সাধারণ।
লেখায় প্রদত্ত রোবট কি আপনার বানানো?
জ্বী লাইন ফলোয়ার রোবট আমি নিজে তৈরি করেছি। তবে সে সময় ক্যামেরা না থাকায় ছবি গুলো তুলতে পারি নি। তাই লিখবার সময় নেট থেকে নেয়া হয়েছে। ভিডিওতে আমার বানানো রোবোটে দেখানো হয়েছে।
এই ট্রানজিস্টর এর পরিবর্তে আর কি ব্যবহার করা যেতে পারে?
যে কোনো সাধারণ ট্রানজিস্টর ব্যবহার করা সম্ভব। যেমন BC547, D400, D882। তবে খেয়াল রাখবেন উক্ত ট্রানজিস্টর টি আপনার মোটরের এম্পিয়ার যেন নিতে পারে।
মোটরের এম্পিয়ার কীভাবে জানবো?
এটি জানার জন্য মোটরের গায়ে দেখুন লেখা আছে 0.1A – এমন । না থাকলে ডাটাশীট অথবা যেখান থেকে কিনেছেন তাদের সহায়তা নিন।
অন্যকোনো সার্কিট কি ব্যবহার করা যাবে?
যেকোনো আলোক সংবেদী বা লাইট সেন্সর (ডার্ক সেন্সর) কে এই কাজে ব্যবহার করতে পারেন। লাইট সেন্সরকে কালো লাইন ফলোয়ার এবং ডার্ক সেন্সরকে সাদা লাইন ফলোয়ার হিসেবে ব্যবহার করা সম্ভব। তার জন্য এই লেখাটি ভালো ভাবে পড়ুন।
উপসংহার
আমি চেষ্টা করেছি লাইন ফলোয়ার রোবট (LFR) এর কৌশল এবং সার্কিট সম্পর্কে যতদূর সম্ভব বিস্তারিত এবং সহজভাবে বুঝিয়ে লেখার। সেই সাথে বাংলাদেশে রোবট ও রোবটিক্স সম্পর্কিত কিছু সংক্ষিপ্ত তথ্যও তুলে ধরেছি। এই পদ্ধতিতে তৈরি করা রোবটের ভিডিও লেখাতে সংযুক্ত করেছি। সাথে কিছু কমন প্রশ্ন ও তার উত্তর সংযুক্ত করা হয়েছে। তারপরও যদি কারো বুঝতে বা লেখার কোথাও কোন ভুলত্রুটি থাকে তাহলে কমেন্ট আকারে জানাতে অনুরোধ রইলো।
Feel free to ask any kind of questions related to this project…. 🙂
বিশেষ দ্রষ্টব্য: এই লেখাটি পূর্বে আমার ফেসবুক প্রোফাইলে নোট আকারে প্রকাশিত।
বিভিন্নপ্রকার তথ্যাবলী উইকিপেডিয়া ও নেট থেকে সংগৃহীত।






{kind=link}
হুম, পাইল্যাবের খাউয়া শেষ!!
Nice…Trick
ok
Vabanubad kora o kintu koster Akta kaz .avabe shomalochona na Kore .utshaho den . athoba apni nije kichu post din . amra notun ra shikhi. Doya Kore shomalochonar shomoy vashar bebohar er dike lokkho rakhun.
best
vai ckt to dekha jay na . ki kori bouln to .