

সূচনাঃ
আজ তৈরি করবো ব্লুটুথ রিমোট কন্ট্রোল গাড়ি। যা খুব সহজেই যেকোন এন্ড্রয়েড চালিত মোবাইল ফোন দিয়ে চালানো যাবে। আধুনিক বিশ্বায়নে রোবটিক্সের অবদান অপরিসীম। নতুন যেকোন কিছু তৈরি করতে আমরা অনেক আগ্রহী থাকি। আর সেটা যদি হয় ব্লুটুথ রিমোট কন্ট্রোল এর মত মজার কোন বিষয় তাহলে তো আর কথাই নেই। তাহলে আর কথা না বাড়িয়ে চলুন দেখি কিভাবে তৈরি করা যায়।
পরিচ্ছেদসমূহ
প্রয়োজনীয় উপকরণ
- ১। আরডুইনো উনো বোর্ড (Arduino UNO);
- ২। মোটর ড্রাইভার (L298N H-Bridge);
- ৩। ব্লুটুথ মডিউল (HC-05);
- ৪। চ্যাসিস ২ চাকা বিশিষ্ট;
- ৫। ব্যাটারী;
- ৬। কিছু তার;
- ৭। সুইচ;
এপ্লিকেশন সমূহ
- ৮। Arduino IDE (Download from official Arduino.cc site for Computer);
- ৯। Bluetooth RC controller from Google Playstore

কাজের সময় প্রয়োজনীয় গুরুত্বপূর্ণ কয়েকটি নির্দেশনাবলীঃ
প্রথমেই ব্যাটারির বিষয়ে বলতে চাই। আমি এখানে ৪ ভোল্টের ২ টি করে ব্যাটারি সিরিজে সংযোগ দিয়ে ৮ ভোল্টের দুইটি ব্যাটারি করেছিলাম। যাতে আমার মোটর ড্রাইভারে দুইটি মোটর চালাতে ৮ ভোল্ট আর আরডুইনো আর ব্লুটুথ চালাতে ৮ ভোল্ট ব্যাটারি ব্যবহৃত হয়েছিল।
আপনারা চাইলে এক জায়গা থেকে পাওয়ার নিতে পারেন। তবে মনে রাখবেন আরডুইনো উনো এর পাওয়ার রেঞ্জ মিনিমাম ৭ ভোল্ট থেকে ম্যাক্সিমাম ৩৬ ভোল্ট পর্যন্ত হয়। ভুলেও এর বেশি দিতে যাবেন না। ৮ থেকে ১২ ভোল্টের মধ্যে রাখলে এখানে ভাল ব্যাক-আপ পাওয়া যাবে বলে আমি আশা করছি। আর মোটর ড্রাইভারের মাক্সিমাম ভোল্টেজ ছিল ১২ ভোল্ট। সুতরাং ৮ থেকে ১২ ভোল্টের মধ্যে রাখলে ভাল ফলাফল পাওয়া যাবে বলে আশা করছি।
আর ব্লুটুথ এর পাওয়ার ইনপুট দিয়েছি আরডুইনো এর বাম পাশের পাওয়ার আউটপুট থেকে। যেখানে আমি ৫ ভোল্ট এর আউটপুট পিনটি ব্যবহার করেছি। আর পুরো গাড়ির অধিক সময় ব্যাক-আপ পাওয়ার জন্য কমপক্ষে ২ এম্পিয়ার কারেন্ট ব্যাবহার করতে পারেন।
মজার অভিজ্ঞতাঃ
আসলে সব কিছু ঠিকঠাক মত লাগানোর পরে আমি লক্ষ্য করেছিলাম যে আমি দুই পাশের দুইটি মোটর উল্টো লাগিয়েছি। তার ফলে আমি যখন গাড়ি সামনের দিকে এগুনোর সিগনাল দিচ্ছিলাম তখন তা শুধু নিজ অক্ষের উপর কেন্দ্র করে ঘুরছিল।
সামনে যাওয়ার সিগনাল দিলে ডানে ঘুরে আর পিছনে যাওয়ার সিগনাল দিলে বামে ঘুরে। পরে এটা ঠিক করতে আমার পুরো চ্যাসিস খুলে তারপর ঠিক করতে হয়েছিল। আশা করি আপনারা এ বিষয়ে খেয়াল রাখবেন যাতে আপনাদের এমন কষ্ট না করতে হয়। তবে সবকিছু ভালভাবে কাজ করার পরে যে মজা পেয়েছি তা লিখে বোঝানোর ক্ষমতা আমার নেই ।
সমস্যা ও সমাধানঃ
কাজ করার সময় অনেক ধরনের সমস্যার সম্মুখীন হতে পারেন। তবে হাল ছাড়বেন না। এক সময় না এক সময় হবেই। নিচে কিছু সম্ভাব্য সমস্যা ও তার সময়াধান দেওয়া হলঃ
(১) কোড আপলোডিংঃ
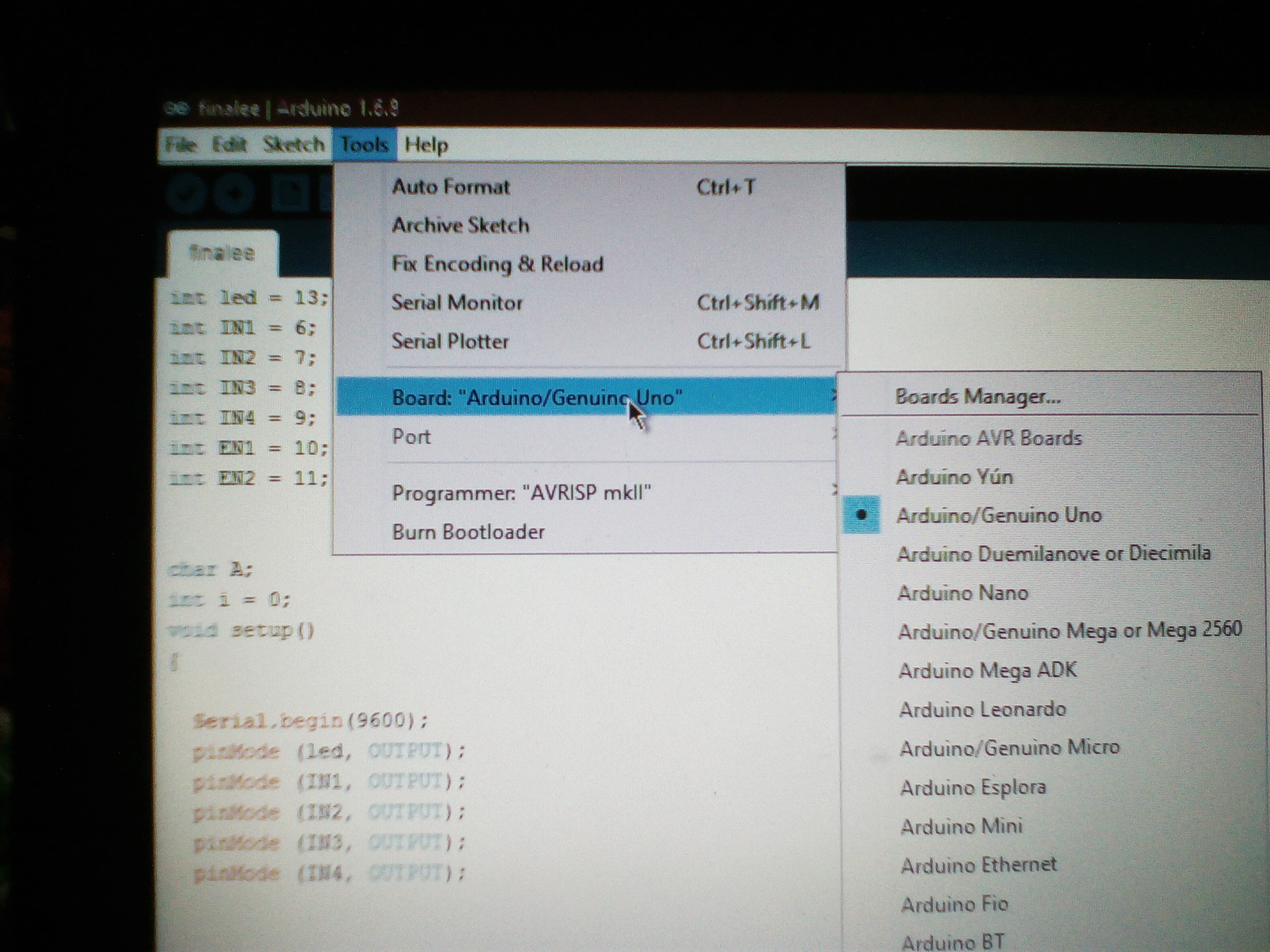
প্রথমে আরডুইনো বোর্ডটিকে কম্পিউটারের সাথে কানেক্ট করুন। এরপর System Management এ গিয়ে দেখুন কত নং COM PORT এর সাথে এটি কানেক্ট আছে। এবার এপ্লিকেশন ওপেন করে স্ক্রিনশট অনুযায়ী COM PORT সিলেক্ট করে নিম্নলিখিত কোডটি কপি করে Arduino IDE এ গিয়ে ফুল Paste করুন। তারপর স্ক্রিনশট অনুযায়ী Upload (এরো) বাটনে চেপে আপলোড করুন। নিচে Done Uploading লেখা উঠলে ভাববেন সব ঠিক আছে আর যদি কোন কারণে Error ম্যসেজ আসে তাহলে তা আবারো ভাল ভাবে চেক করুন। দরকার পরলে একবার Reset বাটন চেপে Reset করে নিন অথবা ডিসকানেক্ট করে আবার পুনরায় কানেক্ট করুন। আশা করি ঠিক হয়ে যাবে।

(২) কানেকশন জনিত সমস্যাঃ
ডায়গ্রামে দেওয়া অনুযায়ী কানেকশন দিতে হবে ।এটি একাধিকবার পরীক্ষা করা ।সেইজন্য যদি কোন কারণে কাজ না করে তাহলে কানেকশন গুলো খুলে আবার ভালভাবে লাগান।
(৩) ব্যাটারিঃ
দেখবেন ব্যাটারিতে যেন ভালভাবে চার্জ থাকে।
(৪) ব্লুটুথ কানেক্টিংঃ
স্ক্রিনশটে যেভাবে দেখানো হয়েছে সেইভাবেই কানেক্ট করুন। তবে এখানে প্রথমে আপনার ব্লুটুথ এ পাওয়ার দিয়ে মোবাইলে ব্লুটুথ টি পেয়ার করে নিতে হবে।HC-05 ব্লুটুথ এর পাসকোড সাধারনত (১২৩৪),(০০০০) এইগুলো হয়ে থাকে। নিচে সম্পূর্ণ স্কিমেটিক ডায়াগ্রাম দেয়া হলো-

ভবিষ্যৎ পরিকল্পনাঃ
আসলে এটি শুধু খেলনা বললে ভুল হবে। বর্তমান বিশ্ব রোবটিক্স চালিত। তাই এর আরো মডিফিকেশন চলছে। সামনে এর সাথে হয়ত কোন রোবটিক হ্যান্ড শিল্ড এবং একটি অতি শক্তিশালী বোম্ব ডিটেক্টর লাগিয়ে আরও অনেক দূর নিয়ে যাওয়া সম্ভব। তাছাড়াও প্রয়োজনীয় আরো অনেক কিছু লাগিয়ে একে আরো অনেক সুন্দর একটি কাজের রোবটে পরিণত করা সম্ভব। হয়তবা আগামীর কোন সংখ্যায় তা আলোচনা করা হবে।
নির্দেশনাঃ
বিশেষ করে যে দুই জনের কথা না বললেই নয় তারা হলেন আমার অতিরিক্ত শ্রদ্ধেয় সৈয়দ রাইয়ান ভাই আর নিউটন ভাই। তারা না থাকলে হয়তবা যাবতীয় সাহায্যগুলো পেতাম না। তারা সাহস থেকে শুরু করে একটা প্রজেক্ট কমপ্লিট করতে যা লাগে তার সব কিছুই দিয়ে গেছেন। ধন্যবাদ দিয়ে বড় করলাম না, আশাকরি সামনে এ ধরনের কষ্ট আরও সহ্য করবেন ।
প্রজেক্টঃ
এই প্রজেক্টটি আমরা নিয়ে গিয়েছিলাম এবারের IUT Mecceleration 2016 নামের ফেস্ট এ। সেখানে Project Showcasing এ আমাদের অবস্থান ৬ষ্ঠ, যা আমাদের গতিকে আরও বাড়িয়ে তুলেছে। এই শো-কেসিং এ আমরা ৪ জন ছিলাম। আমি, নিবিড়, জহির ভাই এবং আবদুল্লাহ। তারা সবাই অনেক সাহায্য করেছে। কিন্তু জহির ভাই এদিক থেকে সেরা।
সমাপ্তিঃ
আজ এ পর্যন্তই। আগামি আরও নতুন কোন লেখা নিয়ে আসব। তার পরেও কোন প্রকার সমস্যায় পড়লে কমেন্টে প্রশ্ন করতে পারেন। যথাসম্ভব সাহায্য করার চেষ্টা করব, ইনশাহ আল্লাহ।
ব্লুটুথ দিয়ে রিমোট কন্ট্রোল গাড়ি প্রজেক্টটির কোড এই লিংক থেকে ডাউনলোড করতে পারবেন







{kind=link}
ardino nano r3 দিয়ে হবে কি ?