আসসালামু আলাইকুম, আমি অন্তর আহমেদ। শুরু করছি আমার “প্রাথমিক মাইক্রোকন্ট্রোলার শিক্ষা” ধারাবাহিক টিউটোরিয়ালের প্রথম পর্ব। এই কোর্সটা মূলত তাদের জন্য যারা ইলেক্ট্রনিক্স নিয়ে কাজ করেন এবং মোটামুটি এনালগ সার্কিট এ জ্ঞান আছে।
মাইক্রোকন্ট্রোলার কিঃ
মাইক্রো মানে “ছোট”, কন্ট্রোলার মানে “যে নিয়ন্ত্রন করে”। তাহলে এর মানে দাঁড়ায় “কোন কিছু নিয়ন্ত্রন করার ছোট একটি যন্ত্র”। এটি আসলে একটি ছোট্ট কম্পিউটার বা একটি সিঙ্গেল চিপ যাতে প্রসেসর, র্যাম, মেমোরি, ইনপুট/ আউটপুট প্রান্তস্থ একই সাথে থাকে।
একে uC/μC [MicroController], MCU [MicroController Unit] ইত্যাদি নামে ডাকা হয়।
মাইক্রোকন্ট্রোলারের কাজ কিঃ
মাইক্রোকন্ট্রোলার কি সেটা আমরা জানলাম। সহজ ভাষায় বলতে গেলে এর কাজ হল কিছু নির্দিষ্ট নিয়ম মেনে কিছু নির্দিষ্ট কাজ সম্পাদন করা। এখানে এই নির্দিষ্ট নিয়মটা হল প্রোগ্রামিং। অর্থাৎ আমরা একে প্রোগ্রামিং এর মাধ্যমে যেভাবে কাজ করতে নির্দেশ করবো এটা ঠিক সেই অনুযায়ী কাজ করবে বা আউটপুট দিবে। মাইক্রোকন্ট্রোলার আসলে একটি প্রোগ্রামাবেল ডিভাইস। যা বারবার যত খুশি ততবার প্রোগ্রাম করা যায়।
মাইক্রোকন্ট্রোলার এর মুল কাজ হল এনালগ কাজকে ডিজিটাল এ করা।
আমরা সবাই জানি এনালগ মানেই ঝামেলা, অনেক পরিশ্রম, ছোট একটি কাজে বড় সার্কিট তৈরি ইত্যাদি। এসব থেকে রক্ষা করতেই বিজ্ঞান আমাদের দিয়েছে মাইক্রোকন্ট্রোলার। যে কাজ করতে এনালগে আমাদের নানা প্রকার IC, transistor, diode ইত্যাদি দরকার হয় সে সকল কাজ আমরা ডিজিটাল এ শুধু ০, ১ দিয়ে করাতে পারি। উদাহরন দিয়ে বুঝিয়ে দেইঃ ধরি আমরা একটি ৭ সেগমেন্ট ঘড়ি বানাবো। তাহলে এনালগে আমাদের লাগছে প্রতিটি ৭ সেগমেন্ট ডিজিটের জন্য একটি করে ৭ সেগমেন্ট ড্রাইভার IC, টাইম কাউন্টার সার্কিট, টাইম সেট করার জন্য আরেকটি সার্কিট। কিন্তু আমরা যদি মাইক্রোকন্ট্রোলার দিয়ে করি তাহলে আমাদের সত্যি শুধু একটি ডিভাইস ছাড়া আর কিছুরই দরকার নেই। সবগুলো সার্কিটের কাজ কে শুধু একটি মাইক্রোকন্ট্রোলার দিয়েই করা সম্ভব।
কিছু জনপ্রিয় ব্রান্ডের নামঃ
- Microchip [PIC/dsPIC].
- Atmel [AVR/ARM].
- Arduino [মাইক্রোকন্ট্রোলার নয় কিন্তু AVR মাইক্রোকন্ট্রোলার দিয়ে তৈরি]
- Samsung/Toshiba/Intel ইত্যাদি আরও অনেক ব্যান্ডের আছে।
প্রত্যেকটি ব্রান্ডের আবার বেশ কিছু model আছে। যেমনঃ
Microchip PIC:
PIC16F series: 16F628, 16F676, 16F72, 16F877 ইত্যাদি ইত্যাদি প্রায় অনেক মডেলের আছে।
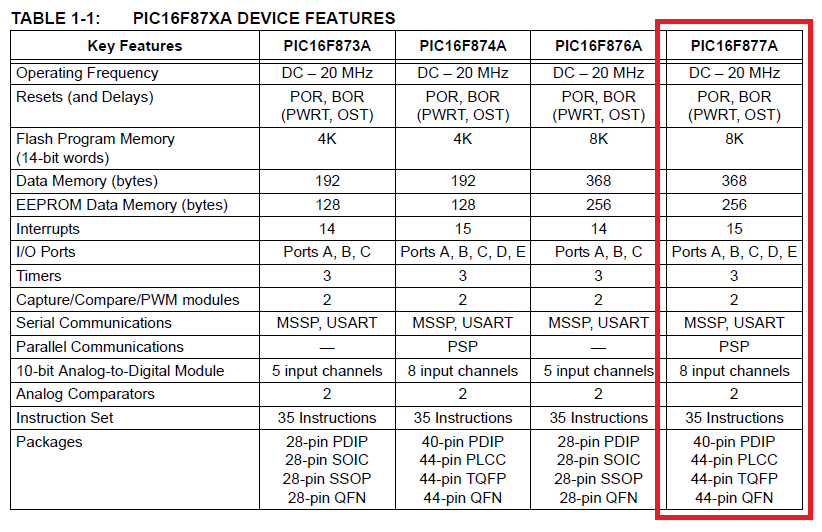
এরকম PIC18F, PIC24F, PIC32F series ইত্যাদি ইত্যাদি। এগুলো একটির থেকে অন্যটি ভিন্ন ভিন্ন। তবে সম্পূর্ণ ভাবে যে ভিন্ন তাও নয়। অনেকটাই মোবাইল ব্রান্ডের সাথে তুলনা করা জেতে পারে। যেমনঃ symphony ব্রান্ডের D series এর D18 মোবাইল। আর এখানে Microchip ব্রান্ডের 16F series এর 16F877A মডেল। আমরা যদি আমাদের ব্যবহারিক জীবনের সাথে সম্পর্ক বের করতে পারি তাহলে আমাদের মনে রাখতে সুবিধা হবে।
[আমাদের এই কোর্সে প্রোগ্রাম করার জন্য আমরা শুধু MICROCHIP এর PIC16F877A ব্যবহার করবো। কারণ, এটি কম দামী এবং বেশি সুবিধা প্রধানকারী এবং প্রায় ৪০টি পিন আছে]
কিছু কথাঃ
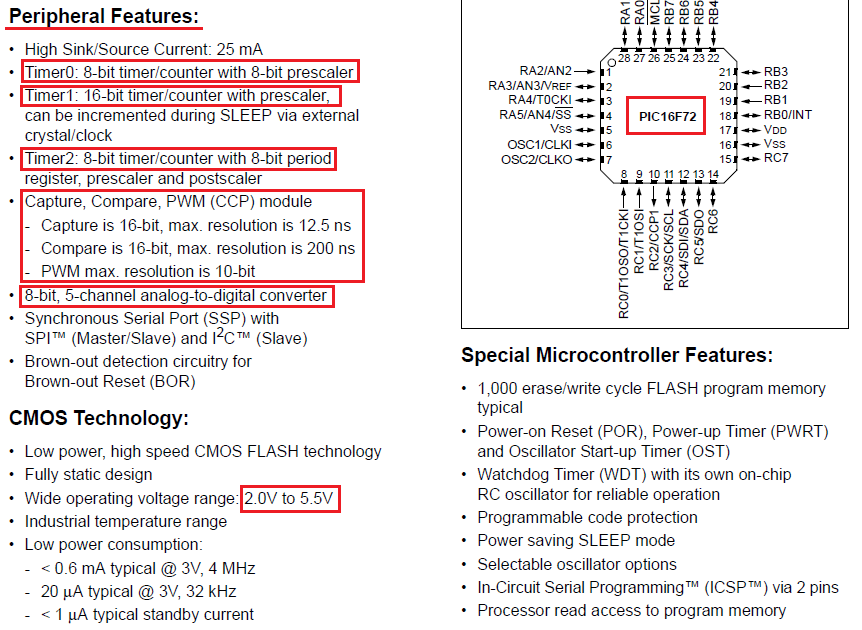
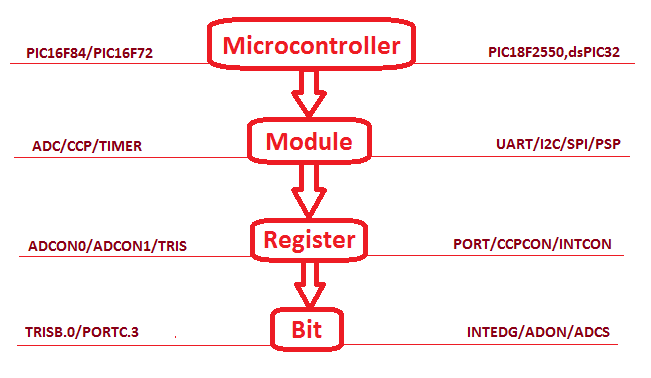
উপরের বর্ণনা থেকে আমরা বুঝতেই পারছি মাইক্রোকন্ট্রোলার আসলে একটা নয়। শত শত মাইক্রোকন্ট্রোলার থেকে আমাকে আমার কাজের চাহিদা অনুযায়ী বেছে নিতে হবে। প্রতিটি মাইক্রোকন্ট্রোলারের কিছু নিজস্ব features থাকে। আমরা ইতিমধ্যে জেনেছি, মাইক্রোকন্ট্রোলারের RAM, ROM, Program memory ইত্যাদি আছে। শুধু তাই নয় প্রত্যেকটি ডিভাইস এর আরও কিছু features আছে, যেমন: ADC, Timer, I2C, USB, DAC, PWM ইত্যাদি [এগুলো পরে বিস্তারিত আলোচনা করা হবে]। এগুলো সব MCU তে সমান পরিমানে থাকে না। আমাদের project এ কি ধরণের features প্রয়োজন এবং কত গুলো পিন লাগবে এগুলো maintain করেই আমাদেরকে সঠিক মাইক্রোকন্ট্রোলার বেছে নিতে হবে।
এজন্য অবশ্যই আপনাকে মাইক্রোকন্ট্রোলারের datasheet পড়তে হবে। datasheet পড়তে পড়তে আপনি এমন দক্ষ হবেন যে তখন datasheet না দেখেই বলে দিতে পারবেন একটি প্রোজেক্ট এর জন্য আপনাকে কোন MCU টা বেছে নিতে হবে এবং কোনটাতে কম খরচেই কাজ হবে।
কোন প্রোগ্রামিং ল্যাঙ্গুয়েজঃ
যেহেতু মাইক্রোকন্ট্রোলার প্রোগ্রাম এর মাধ্যমে কাজ করে তাহলে অবশ্যই আমাদের একটি প্রোগ্রামিং ল্যাঙ্গুয়েজ শিখতে হবে। কম্পিউটার প্রোগ্রামিং এর মতো মাইক্রোকন্ট্রোলারেরও অনেক প্রোগ্রামিং ল্যাঙ্গুয়েজ আছে।
আমি আমার এই কোর্সে সি প্রোগ্রামিং ল্যাঙ্গুয়েজ শিখাব এবং এই প্রোগ্রামিং ল্যাঙ্গুয়েজ এই কাজ করবো।
MICROCHIP এর জন্য সবথেকে ভাল একটি কম্পাইলার হলঃ
>>MikroC pro for PIC [cracked]. [click to download]
সার্কিট চেক করব কিভাবেঃ
আমরা তো অনেক project ই করব প্রতিটা project তো আমদের circuit এ করে চেক করা সম্ভব না। কারন প্রজেক্ট সঠিক ভাবে কাজ করবে কিনা তা আমরা জানি না সুতরাং বুজতেই পারছেন আমদের কত টাকা নষ্ট হবে…??? Proteus এমন একটি software যা দিয়ে আপনি computer এই circuit RUN করে চেক করতে পারবেন circuit টি কাজ করে কিনা। তাহলে বুঝতেই পারছেন Proteus একটি virtual circuit checking software.
>ISIS Proteus 8 professional [cracked].[click to download]
বার্নার বা রাইটারঃ
সফটওয়্যার ছাড়াও আমাদের আরেকটা জিনিস লাগবে যা খুবই গুরুত্বপূর্ণ। সেটি হল একটি ডিভাইস যা দিয়ে আমরা আমাদের করা প্রোগ্রামটিকে আমাদের মাইক্রোকন্ট্রোলারে নিবো। এটা অনেকটা কার্ড রিডার এর মত কাজ করে। আমরা যেমন মেমোরি কার্ড এ গান, ছবি লোড করার জন্য কার্ড রিডার ব্যবহার করি ঠিক তেমনই মাইক্রোকন্ট্রোলারে প্রোগ্রাম লোড করার জন্য এই ডিভাইসটির প্রয়োজন হয়। এর নাম PIC Burner/PIC Programmer.
কোনটি ভাল হবে?
বাজারে নানা প্রকারের এই ডিভাইস পাওয়া যায়। প্রশ্ন হল তাহলে আমার জন্য কোনটা ভাল হবে?
১। যদি আপনি শুধু MICROCHIP এর মধ্যেই সীমাবদ্ধ থাকতে চান তাহলে আপনার জন্য PICKIT 2/3.
২। আবার আপনি যদি চান যে আপনি একসময় AVR, Intel, 8051 ইত্যাদি নিয়ে কাজ করবেন তাহলে আপনার জন্য Universal Topwin Programmer ভাল হবে।
[MickoC এবং Proteus কিভাবে সেটআপ করতে হয় তা তাদের নিজ নিজ ফোল্ডার এ Readme.txt ফাইলে উল্লেখ্য করা আছে। তাও কারো যদি সেটআপ করতে কোন সমস্যা হয় তাহলে আমাকে জানাবেন]
আরেকটা কথা, আপনারা প্রোগ্রাম রাইট করার জন্য যে ডিভাইসই ব্যবহার করেন তার জন্য একটি সফটওয়্যার প্রয়োজন হয়। যেমনঃ PICKIT 2 এর জন্য PICKIT 2.61. [Click to download]
[পরবর্তীতে আমরা যখন আমাদের প্রথম প্রোগ্রাম লিখবো তখন আমরা দেখবো কিভাবে এই ডিভাইস ব্যবহার করতে হয়।]
যারা নতুন কাজ শিখছেন তাদের জন্য আপাতত আর কিছুই লাগবে না। এগুলো নিয়েই মাঠে নামতে পারেন।
PIC16F877A এর কিছু সাধারন আলোচনাঃ
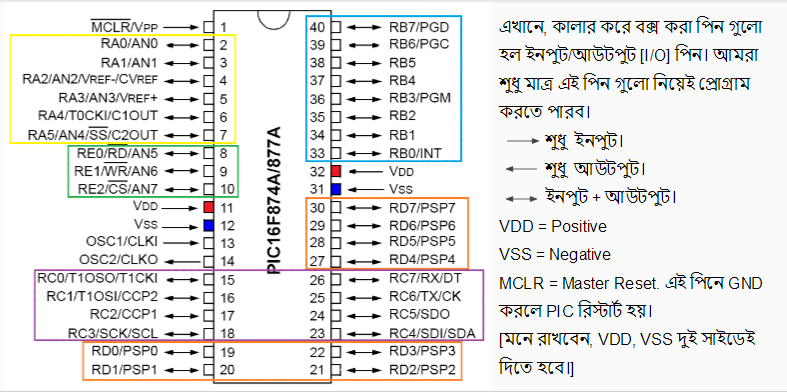
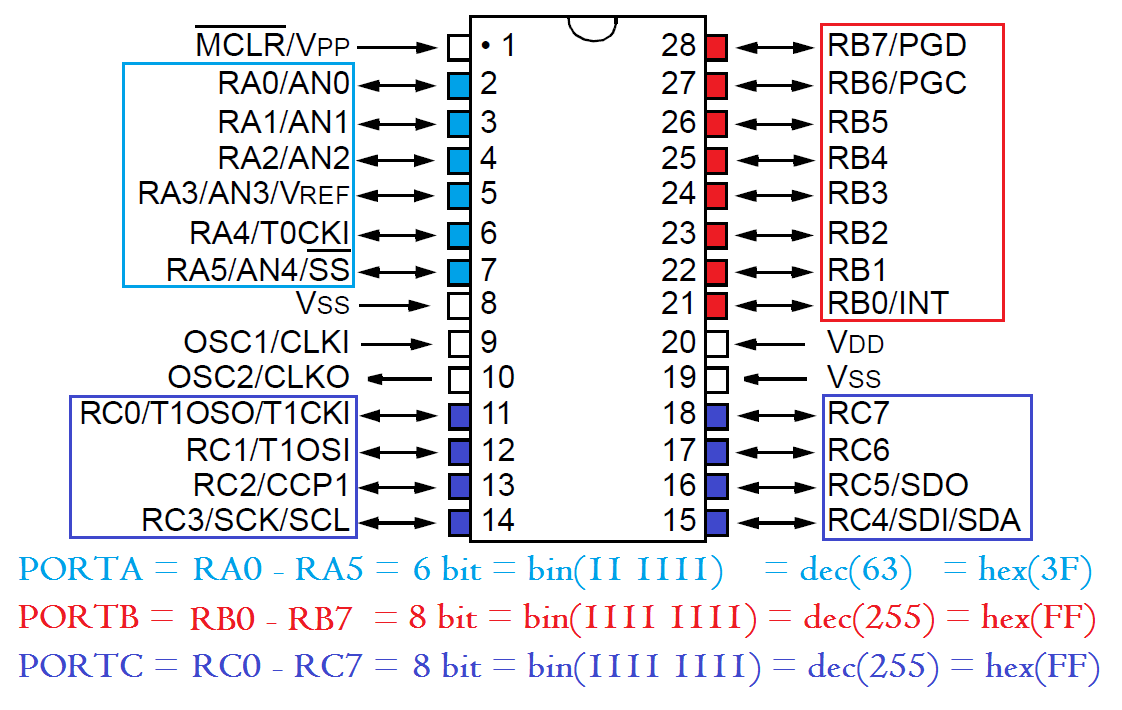
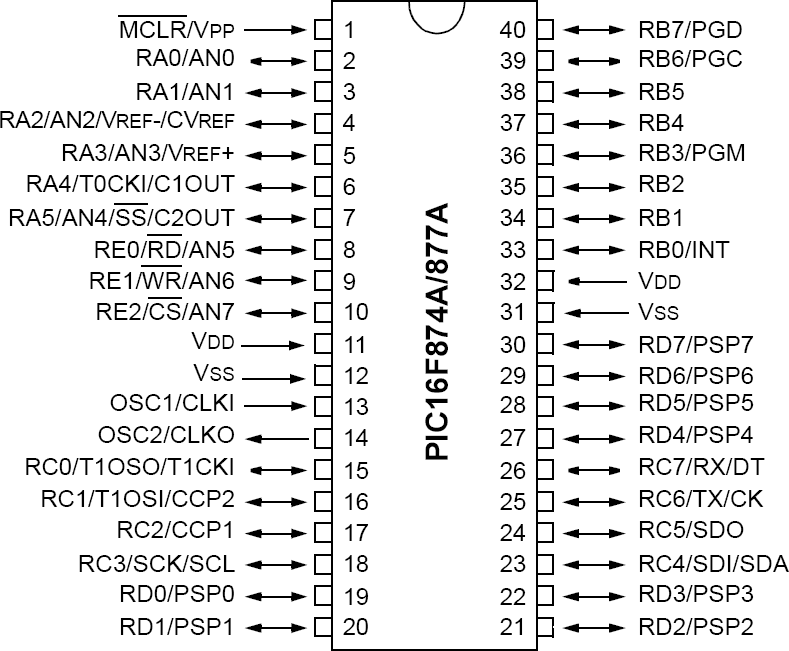
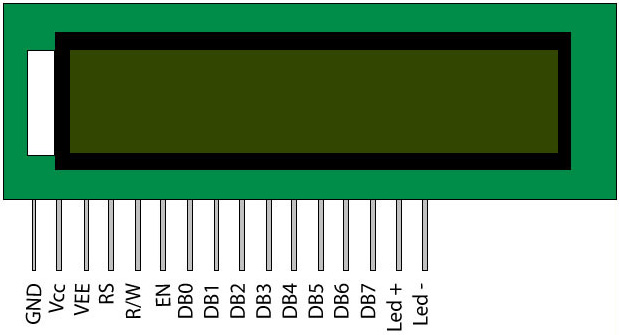
মাইক্রোকন্ট্রোলারের পিন পরিচিতিঃ
RA, RB, RC, RD, RE[0….n] = ইনপুট/আউটপুট।
AN[0….n] = Analog to Digital(ADC) পিন।
TX, RX = USART protocol.
SDA, SCL = I2C protocol.
SDI, SDO, SCK = SPI protocol.
PSP[0….n] = PSP protocol.
INT[0..n] = External Interrupt.
PGC,PGD, PGM = প্রোগ্রাম লোড করার পিন।
CCP = Capture/Compare/PWM.
OSC1, OSC2 = Crystal.
ইত্যাদি ইত্যাদি……। [পরে সবকিছুর বিস্তারিত ধারাবাহিক ভাবে উপস্থাপন করা হবে।]
আরেকটু ক্লিয়ার করে দেই। একটা পিনের একাধিক নাম থাকার মানে এই না যে পিনটি দিয়ে একসাথেই সবগুলো বা একাধিক কাজ করানো যাবে। একটি পিনকে একটি প্রোগ্রামে শুধুমাত্র একটি কাজে ব্যবহার করা যাবে। যেমনঃ আমরা যদি কোন পিন ইনপুট/আউটপুট হিসেবে কাজ করাই তাহলে সেই পিনকে আর ADC বা অন্য কোন কাজে ব্যবহার করতে পারব না। এমনকি যদি ইনপুট হিসেবে কাজ করাই সেক্ষেত্রেও এই পিনকে আর আউটপুট হিসেবে কাজ করানো যাবে না।
আবার আমাদের যদি জানা থাকে ADC এর জন্য PIC এ AN পিন থাকে তাহলে আমরা PIC এর পিন ডায়াগ্রাম দেখেই বলে দিতে পারব কোন PIC এ ADC আছে এবং কয়টি আছে।
বেসিক পাওয়ার সাপ্লাইঃ
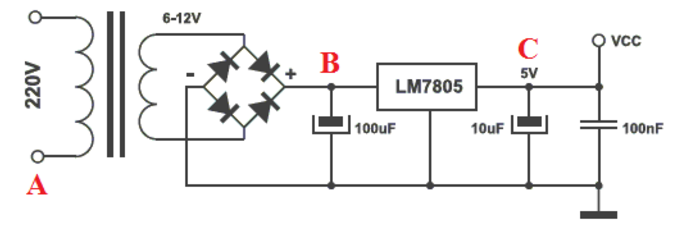
আমাদের মাইক্রোকন্ট্রোলারটি চালু করতে প্রথমেই আমাদের একটি পাওয়ার সাপ্লাই লাগবে। যা অবশ্যই 5V এর হতে হবে। উপরে আমি একটি পাওয়ার সাপ্লাই দেখিয়েছি। যার A পয়েন্টে AC লাইন অথবা B পয়েন্টে 6-18V পর্যন্ত অথবা C পয়েন্টে সরাসরি 5V দিলেই আমাদের মাইক্রোকন্ট্রোলারটি চালু হবে। [A, B, C এর যেকোনো একটিতে দিলেই হবে।]
পাওয়ার সাপ্লাই এ আমরা দেখেছি VCC নামে একটি চিহ্ন আছে যা এই সার্কিটের VCC এর সাথে যুক্ত হবে।
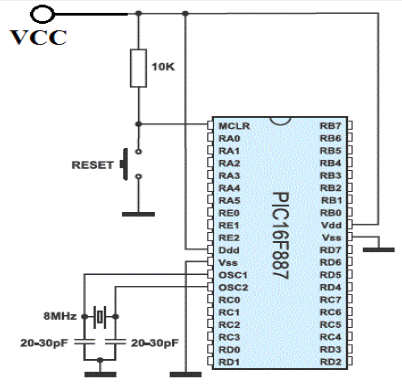
এটিই মূলত মাইক্রোকন্ট্রোলারের বেসিক সার্কিট।
MCLR পিন VCC এর সাথে 1-10K রেজিস্টর দিয়ে লাগানো হয়। RESET বাটন বাধ্যতামূলক নয়।
এখানে OSC1, OSC2 তে লাগানো Crystal এর মান 4-40MHz পর্যন্ত হতে পারে। কোন কোন PIC এ এটি না লাগালেও কাজ করবে। কারন সেই PIC এর ইনসাইডে built-in ভাবে 8MHz লাগানো থাকে। তবে প্রোগ্রামে অবশ্যই উল্লেখ করে দিতে হয় PIC টি কোন ক্লক সোর্সে চলবে। এজন্য অবশ্যই Datasheet পরতে হবে।
Crystal মূলত প্রসেসরের কাজ করে। যা PIC কে স্পীড দিয়ে থাকে।
আজ এই পর্যন্তই। আল্লাহ হাফেয। 🙂
পরবর্তী আকর্ষণঃ
১। ডাটাশীট কিভাবে পরতে হয়?
২। pIC16F877A নিয়ে আলোচনা।















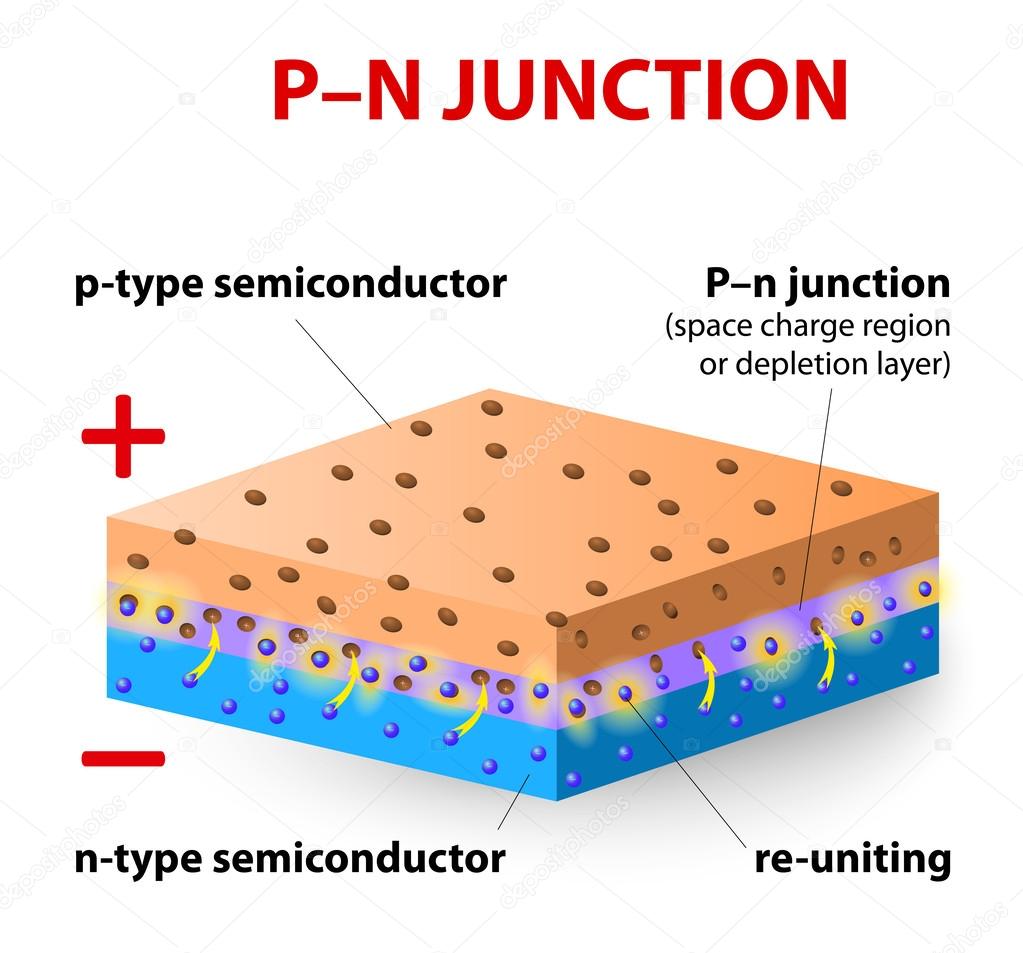
 এখন, একটা হোল বহন কারি পরমানু অন্য একটা পরমানু থেকে ইলেকট্রন নিয়ে ঠিক যখনই অষ্টক পুর্ন করে এবং অপর পরমানুতে হোলের সৃষ্টি হয় তখনই শক্তি আলোক রূপে বিকীর্ণ হয়৷
এখন, একটা হোল বহন কারি পরমানু অন্য একটা পরমানু থেকে ইলেকট্রন নিয়ে ঠিক যখনই অষ্টক পুর্ন করে এবং অপর পরমানুতে হোলের সৃষ্টি হয় তখনই শক্তি আলোক রূপে বিকীর্ণ হয়৷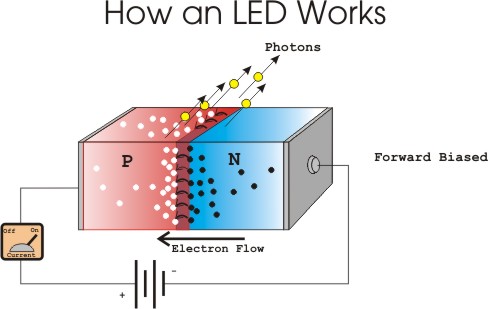
")











